
Human Locomotion Research
In 2018, during my ERASMUS exchange, I participated in an Advance Research Project in a 4 students group, supervised by a researcher. Our goal was to do a meta analysis, i.e. to search through the literature existing mechanical principles in use for prosthetic legs.
While the 3 other students have looked for energy and power requirement for a set of activities (walking, jogging, running, cycling, sit to stand, etc.) performed by humans, I looked for mechanical principles that could replace lower limbs muscles and tendons.
The Hill's muscle model
I considered several approaches for modeling muscle or limbs. One of the most famous is the Hill’s muscle model:
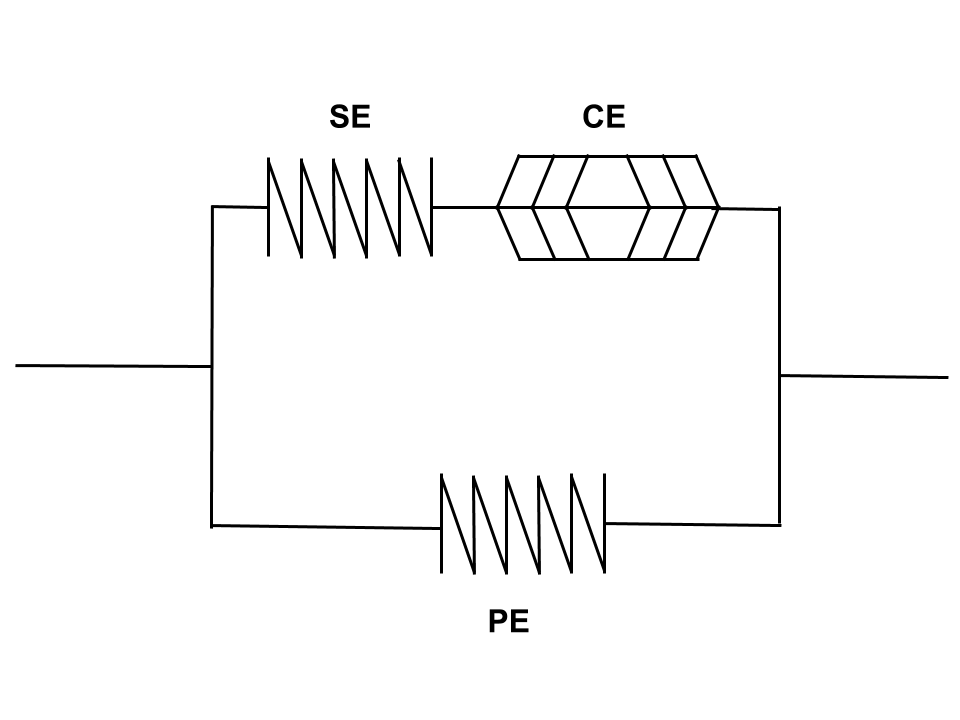
This model is composed of two non-linear springs (SE and PE), and a contractile element. It’s an approximation of human muscle and how the force is generated. Please give a look at the wikipedia article I have referenced above for more precisions.
Existing muscle approximations
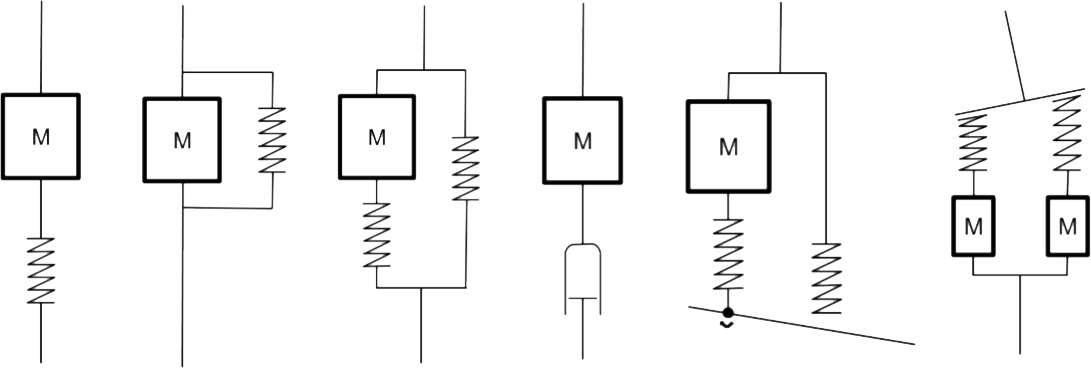
I have also built a list of mechanisms that exist in the scientific literature. Those mechanical have been embedded into human prostheses, with some being in commercial use. The idea is to explain the different conception choices for a prosthesis designer, their advantages and drawback. In the paper, the corresponding section (4) is written as a story, where the simplest approaches are first presented, with their limitations that are then overcome by more sophisticated ones.
Here is an image from this section, gathering the different mechanical models that are described in the paper:
[pdf-embedder url=”https://quentindelfosse.me/wp-content/uploads/2019/09/ARP_Inquiry_on_prosthetic_legs.pdf”]