Thor 3D printed Robots
The Thor Project
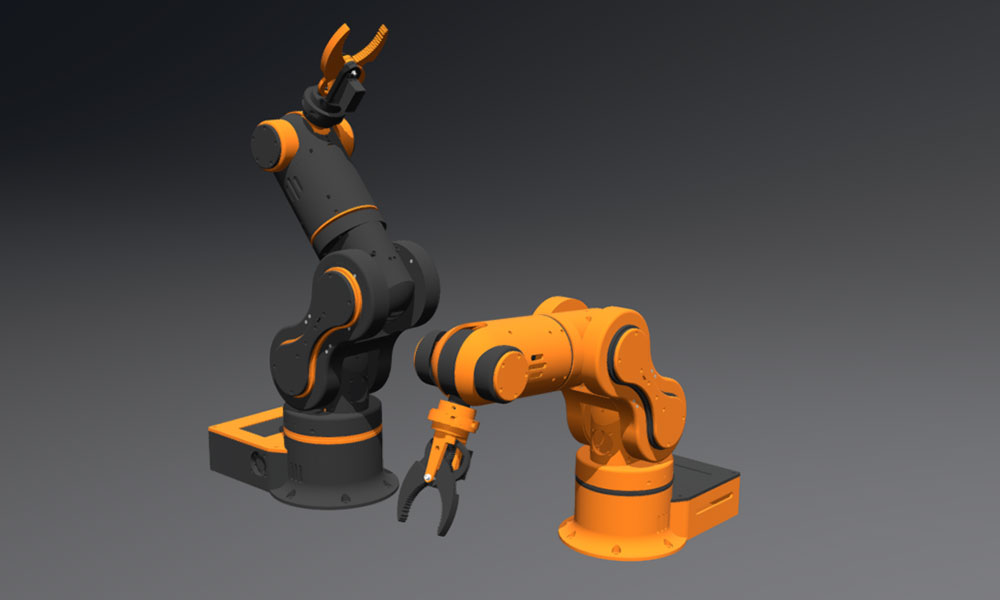
The Thor Project is a project created by AngelLM, who wanted to create an Open-Source 3D printable Robotic Arm. The author has designed with FreeCAD all 3D printable parts, along with sensors, actuators and other materials. The project has a hackaday page, and a github one. I recommend using the GitHub page, as it is updated frequently, particularly to get build animations and meshes.
The image provided here is taken from the freecad software. AngelLM has created animation files, that use Exploded assembly in Freecad to detail the steps to follow for building Thor.
Compared to other 3D printable robotic arms on the web, available on the web when I started the project, Thor had lots of resources available on its GitHub page, an easily “hackable” software (python) and an already existing strong community, that had already brought two consecutive improvements, by Danny Van Den Heuvel, and by Sepio.
I made this project with the Fablab of TU Darmstadt, and we aimed to integrate those last improvements in our builds, as detailed hereafter.

Iterating with the TUD Fablab
The biggest advantage we had in building two robotic arms was that we had the possibility to alternatively build and improve each robot, using the experience gathered on the last built, to improve the next one. We have also taken several approaches to adjust some part where we had different components (especially for sensors).
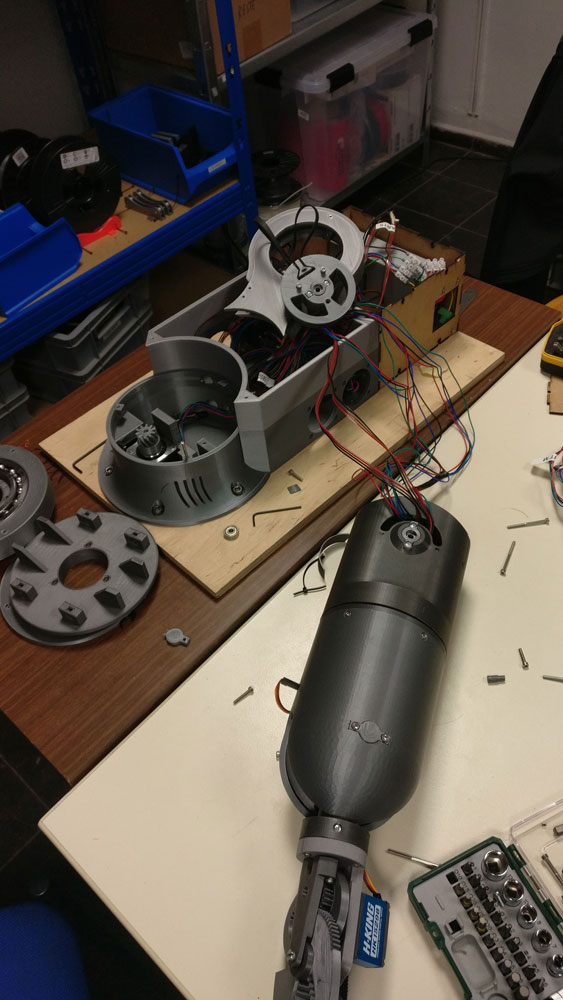
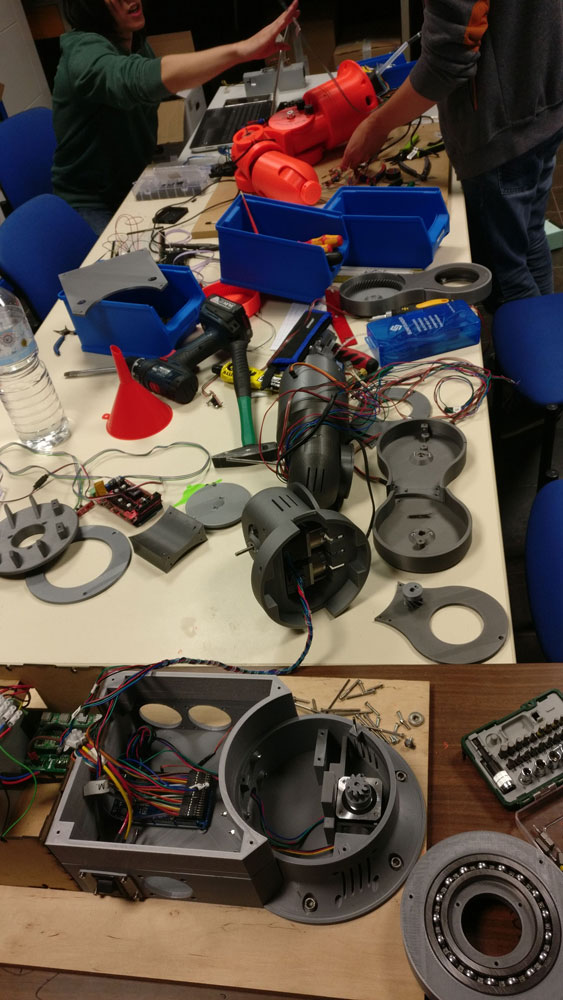
Here are some images of the first built, with the PCB board and the Mantis Gripper of 4ndras:






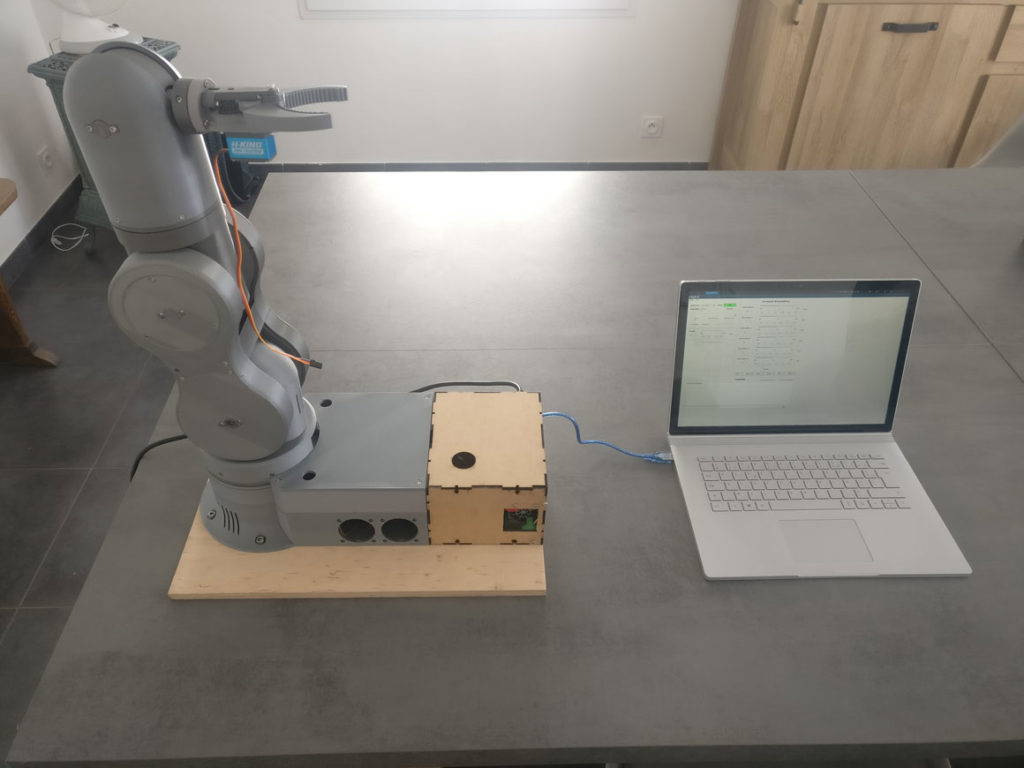
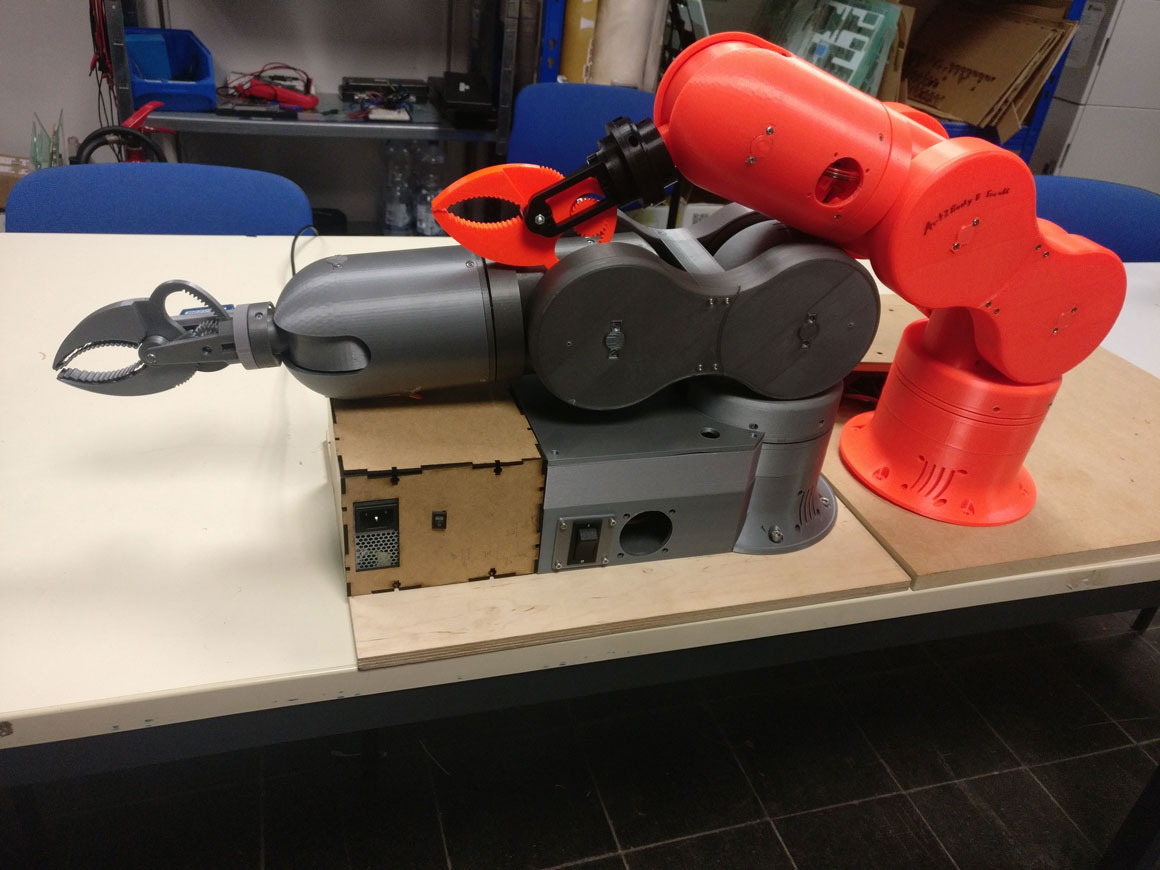
Here is the first complete built of the first Thor we made:

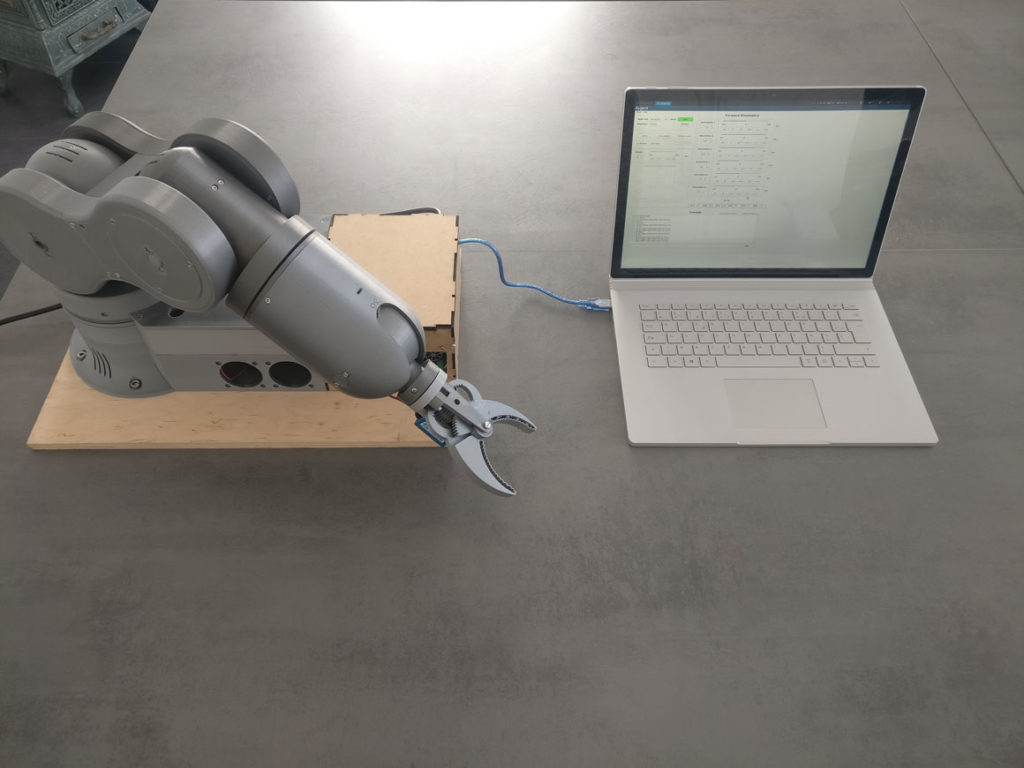
We then branched it and built an enclosure for the power supply, by laser cutting it (one photo above), we installed Asgard, and slightly modified the settings for optimal performances, here is the final result (with Asgard running on the computer):
Building the second one:
We then built the second Thor robot, using the experience from the first to correct small defaults, and unmounted and remounted them both in parallel, with double checking for each joint during the building process, to finally have two working robotic arm:

Building the improved version
We then wanted to build the improved version of Thor, and create a new robotic arm, with several improvements.
Hereafter is an animation showing how the final result should look like (thanks to sepio, who recreated a Fusion360 version of the Thor robot, and made the improvements):
Integrating thor in Reseach
We have also used Thor in a research project done at IAS TU Darmstadt, from which a paper was then submitted to the IROSWS19 workshop.
If you want to get more details on the research done here, please look at this page:
Intrinsically Motivated Grasping
Futur projects
Having such a nice and reliable robotic arm allow me to work on several projects to improve it, or to solve other fun problems. I describe them hereafter.
Integrating Thor in the ROS Environment
I am currently building a Robot Operating System (ROS) package of the THOR robot, to play around.
Further details should come soon.
Having Thor playing Chess ♞
Another nice idea that popped up during the construction of Thor was to have him play chess against a human being. We could notably have it (him? :p) play on the DIY chess coffee table, that is presented in another post. Stay tuned!